
Why UAV Video Modules Should Be Evaluated from Camera to Ground Station, Not Only by Sensor Specs
UAV Video Module Evaluation: From Camera to Ground Station
FPV

Meta Title
UAV Video Module Evaluation: From Camera to Ground Station
Meta Description
A UAV video module should not be evaluated only by sensor specs. Engineering teams need to review the full video path: camera, ISP, encoding, OSD, telemetry, transmission, receiver, decoder, display, and ground-station workflow.
Slug
uav-video-module-camera-to-ground-station-evaluation
Target Reader
UAV manufacturers, payload integrators, CTOs, Head of Engineering, technical directors, UAV systems engineers, payload engineers, and embedded vision teams.
Customer Pain Point
A camera can produce a clear image at the output, but the final UAV video feed may still become delayed, unstable, difficult to integrate, or difficult to repeat after the full video path is connected.
Technical Variables
Sensor, ISP, H.264 / H.265 encoding, OSD / telemetry overlay, RTSP / WebRTC streaming, transmission path, receiver workflow, decoder, display, ground-station software, power input, and repeatable configuration.
BD Use Case
Send this article to UAV manufacturers, payload integrators, ISR payload teams, and system integrators when opening a conversation about UAV video return, camera module selection, OSD integration, or ground-station video workflow.
CTA
Send Thyraon your target resolution, frame rate, interface, power input, OSD / telemetry requirement, receiver setup, and ground-station workflow. We can help review the video path before the camera module becomes an integration bottleneck.
A clear camera output is not the same as a usable UAV video feed
Many UAV video projects start with the same question:
Which camera module has the right resolution, sensor, size, and price?
That question matters, but it is incomplete.
For UAV manufacturers and payload integrators, the camera output is only the first point in the video path. The operator, ground station, or downstream system does not evaluate the raw sensor output. It evaluates the final video feed after the signal has passed through processing, encoding, overlay, transmission, receiver hardware, decoding, display, and software workflow.
That means a camera can look good during a bench test and still create problems after integration.
The image may be clear, but the feed may arrive too late.
The resolution may be correct, but the frame pacing may be unstable.
The sensor may perform well, but the receiver workflow may add delay.
The module may work in one prototype, but the same configuration may be difficult to repeat across later builds.
For UAV engineering teams, the more useful question is not:
“Does this camera output a good image?”
The better question is:
“Can the full camera-to-ground-station video path stay current, stable, and repeatable under the actual integration conditions?”
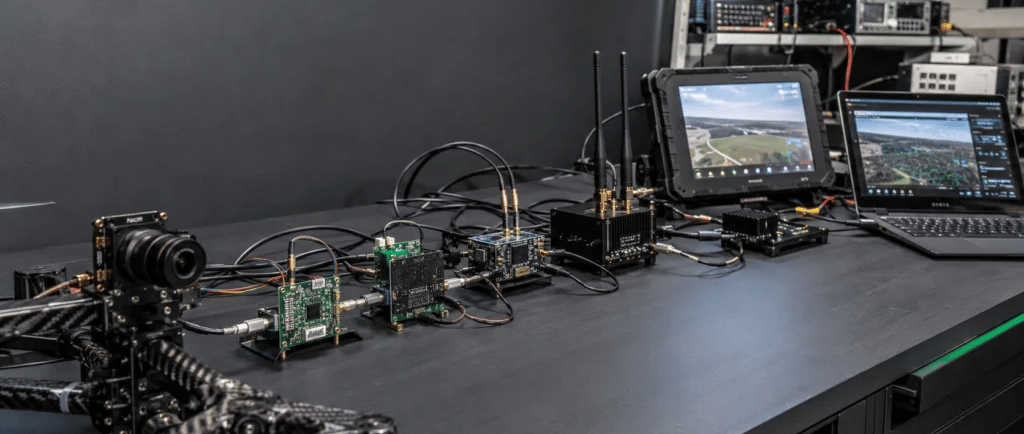
The UAV video path is longer than the camera
A UAV video system usually includes more than the camera module.
A practical video path may include:
camera capture
ISP processing
hardware encoding
OSD / telemetry overlay
video transmission
receiver hardware
decoder workflow
display setup
ground-station software
operator review or algorithm processing
Every stage can affect the final result.
If the engineering team evaluates only the camera output, several integration risks remain hidden until later in development. These risks often appear after the platform layout, power architecture, receiver setup, or ground-station workflow has already been decided.
That is when the cost of changing the video architecture becomes higher.
Sensor specs do not explain end-to-end behavior
Sensor size, resolution, frame rate, WDR, low-light sensitivity, and lens selection are important. But they do not explain how the video will behave after integration.
A UAV video feed can become less useful because of issues outside the sensor:
encoding adds delay
bitrate settings change image behavior
OSD overlay affects workflow
RTSP or WebRTC behaves differently across receiver environments
receiver-side decoding adds delay
display settings change perceived responsiveness
ground-station software freezes, buffers, or drops frames
power fluctuation affects video stability
the same configuration is not repeated in later builds
These are not minor implementation details. They affect whether the UAV operator receives current and usable visual feedback.
A technically strong camera module still needs to be reviewed as part of a system.
Low latency should be reviewed by boundary, not only by number
Low latency is often advertised as a single number.
That is not enough for UAV video integration.
Before engineering teams compare latency claims, they should clarify what the number includes.
Is the latency measured at the camera output?
Does it include ISP processing?
Does it include encoding?
Does it include OSD / telemetry overlay?
Does it include transmission?
Does it include receiver processing?
Does it include decoding?
Does it include the display?
Does it include the ground-station workflow?
Without a defined boundary, the number can be technically accurate but commercially misleading.
For UAV applications, the value of low latency is not the number alone. The value is whether the video feedback remains current enough for the actual workflow.
This is why UAV video modules should be tested under defined conditions, including resolution, frame rate, interface, receiver setup, display path, and ground-station software.
OSD and telemetry are part of the video decision
OSD and telemetry are often treated as secondary features.
In UAV integration, they are not secondary.
If the video feed is used for operation, testing, monitoring, or payload evaluation, overlay information may need to stay aligned with the video workflow. A camera image may be clear, but if the OSD or telemetry workflow does not integrate correctly with the receiver and ground station, the final feed may be less useful.
Engineering teams should review:
how OSD is added
which telemetry workflow is required
whether the receiver supports the intended display path
whether the ground-station software handles the stream consistently
whether the overlay remains usable during motion
whether the same configuration can be repeated later
A video module should not be approved only because it outputs video. It should be reviewed by whether it supports the intended operator or system workflow.
Receiver-side usability is often underestimated
Many UAV projects spend time evaluating the camera and transmission path, then leave the receiver side until later.
That creates risk.
The receiver determines how the video is decoded, displayed, recorded, monitored, or passed into the ground-station workflow. A feed that works in one player or one laptop setup may behave differently in another embedded display, ground-station application, or decoder environment.
Receiver-side workflow can affect:
latency
frame stability
display scaling
OSD readability
recording behavior
stream recovery
operator usability
software compatibility
For engineering managers, this means the receiver workflow should be part of early video-path review, not a late-stage integration task.
The final user does not experience the camera. The final user experiences the complete video path.
Prototype success does not guarantee repeatable deployment
A single successful prototype can hide future production risk.
A prototype may work because one exact combination of hardware, firmware, bitrate, receiver, display, cable layout, and software version happens to behave correctly.
But later builds may expose differences:
a changed receiver adds delay
a display handles the stream differently
a firmware setting changes encoding behavior
a cable route increases noise or instability
a bitrate setting affects motion detail
a power source behaves differently under load
a new batch needs the same configuration to be repeated
For UAV manufacturers and system integrators, the key issue is not only whether one sample works.
The key issue is whether the configuration can be reviewed, documented, and repeated.
This is why repeatable configuration matters. It reduces the risk that a working prototype becomes a difficult deployment problem.
A stronger evaluation checklist for UAV video modules
Before choosing a UAV video module, engineering teams should review the complete path.
1. Camera and image requirements
Define resolution, frame rate, sensor requirement, low-light condition, WDR / HDR need, lens field of view, and mechanical limits.
2. Encoding workflow
Confirm H.264 / H.265 requirements, bitrate behavior, compression tolerance, and whether the encoding path supports the expected latency and image quality.
3. OSD / telemetry workflow
Clarify whether telemetry overlay is required, how it will be added, and whether it remains usable in the receiver and ground-station workflow.
4. Streaming and protocol path
Review RTSP, WebRTC, or other stream requirements before the module is locked into the platform.
5. Transmission and receiver setup
Check the actual receiver hardware, decoder path, display setup, and ground-station software.
6. Power input
Review platform power range, load variation, cable layout, and whether power instability could affect video behavior.
7. Latency boundary
Define exactly where latency is measured and what the test includes.
8. Repeatable configuration
Document the settings and hardware path so the same behavior can be reproduced across later builds.
Where Thyraon fits
Thyraon builds camera systems and video integration modules for UAV, UGV, robotics, and embedded vision projects.
Our role is not only to provide a camera module.
Our role is to help engineering teams review the video path around the camera.
This includes:
camera module selection
H.264 / H.265 encoding workflow
RTSP / WebRTC streaming review
OSD / telemetry integration
receiver-side usability
wide power input requirements
low-latency video return under defined test conditions
prototype-to-build configuration repeatability
The goal is not to claim that one module fits every platform.
The goal is to help teams define the video path early, identify hidden integration risks, and choose a configuration that can be reviewed before the platform moves further into development.
The better first conversation
Instead of starting only with sensor specs, a better first conversation should include:
What is the target resolution and frame rate?
Where will the video be displayed?
Will the feed go through a ground-station workflow?
Is OSD or telemetry required?
Which streaming protocol is expected?
What receiver and decoder will be used?
What is the platform power range?
Where should latency be measured?
Will this configuration need to be repeated across later builds?
These questions help engineering teams avoid selecting a camera that works at the output but fails as part of the system.
Conclusion
UAV video modules should not be evaluated only by sensor specs.
A useful UAV video feed depends on the full camera-to-ground-station path: camera capture, ISP, encoding, OSD / telemetry overlay, transmission, receiver, decoder, display, ground-station software, power input, and repeatable configuration.
For UAV manufacturers, payload integrators, and system integration teams, this changes the evaluation process.
The question is not only whether the camera image is clear.
The question is whether the video path remains current, stable, usable, and repeatable after integration.
Thyraon helps engineering teams review this path before the camera module becomes an integration bottleneck.
Send us your target resolution, frame rate, interface, power input, OSD / telemetry requirement, receiver setup, and ground-station workflow. We can help review the video path under defined integration conditions.
What is UAV video integration?
UAV video integration is the process of reviewing the complete video path from camera capture to ISP, encoding, OSD / telemetry overlay, transmission, receiver processing, decoding, display, and ground-station workflow.
Why should UAV video modules not be evaluated only by sensor specs?
Sensor specs do not show how the final video feed behaves after encoding, transmission, receiver processing, display, and ground-station software. A clear camera output can still become delayed, unstable, or difficult to repeat after integration.
What should engineering teams check before selecting a UAV video module?
Engineering teams should check resolution, frame rate, encoding format, streaming protocol, OSD / telemetry workflow, receiver setup, display path, power input, latency boundary, and repeatable configuration.
Why is receiver workflow important in UAV video systems?
Receiver workflow determines how the video is decoded, displayed, recorded, and used by the operator or ground station. Receiver-side behavior can affect latency, stability, OSD readability, and final usability.
What does Thyraon provide for UAV video integration?
Thyraon provides camera systems and video integration modules for UAV, UGV, robotics, and embedded vision projects, with focus on video return, encoding workflow, OSD / telemetry integration, receiver-side usability, wide power input, and repeatable configuration review.
Address
Address: 4th Floor, Building A2, Guangxingteng Business CenterNo. 265, Shenshan Road, Longgang District
Shenzhen, Guangdong 518117,China
Post Code: 518117
Contacts
WhatsApp: +86 13715115820
Linkedin